3.1.3.1. Система катушек с перпендикулярными осями
3.1.3.1. Система катушек с перпендикулярными осями
Рассмотрим более подробно взаимодействие датчика металлоискателя с металлической мишенью на примере системы катушек с перпендикулярными осями, рис.1 а. Для простоты рассмотрим систему с катушками, продольными размерами которых можно пренебречь. Будем в дальнейшем считать, что излучающая и приемная катушки представляют собой круглые бесконечно тонкие рамки (см. рис.3). Для такой рамки вектор магнитного момента при протекании тока I имеет вид:
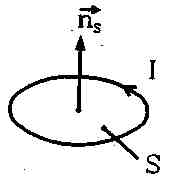
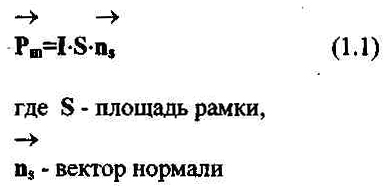
Рис.3. Модель излучающей катушки.
Индукция магнитного поля, создаваемого тауой рамкой на большом расстоянии г от ее центра (см. рис.4), составляет:
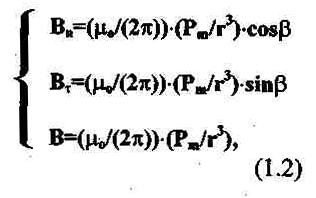
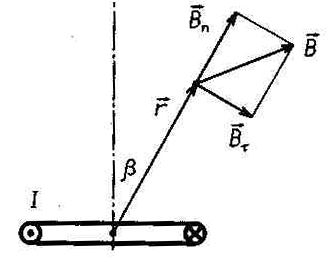
Рис. 4. Компоненты вектора индукции магнитного поля излучающей катушки.
полагая ,что r>>ЦS, а индексы "n" и "t" обозначают соответственно нормальную и тангенциальную составляющие вектора магнитной индукции.
Рассмотрим взаимодействие излучающей рамки, приемной рамки и объекта в случае катушек с перпендикулярными осями (см. рис.5).
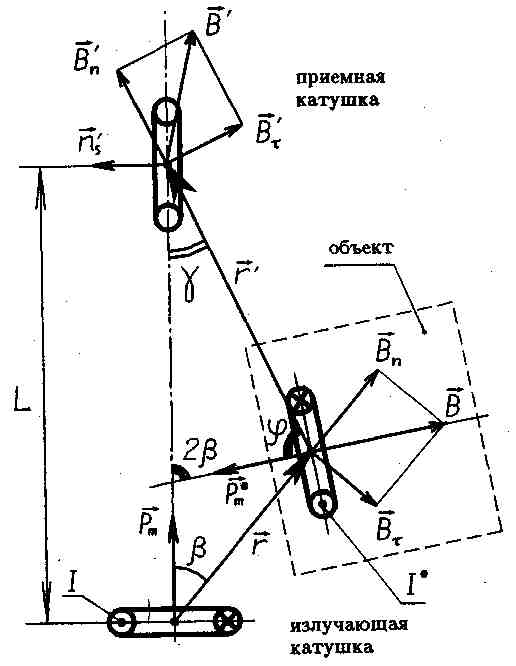
Рис. 5. Взаимное расположение катушек датчика металлоискателя и объекта (мишени).
Угол между осью симметрии системы катушек и вектором индукции поля В излучающей катушки равен 2р, так как силовые линии вследствие соотношений (1.2) являются окружностями, и ввиду допущения о малых размерах катушек:

где L - так называемая база датчика металлоискателя (см. рис.5).
Рис. 3. Модель излучающей катушки - формулы

Рис. 3. Модель излучающей катушки.

Рис. 4. Компоненты вектора индукции магнитного поля излучающей катушки.

Рис. 5. Взаимное расположение катушек датчика металлоискателя и объекта (мишени).

Ф. 1.2 Индукция магнитного поля

Ф. 1.3 Определение угла между осью симметрии системы катушек и вектором индукции поля В
