3.1.3. Теоретические соображения
3.1.3. Теоретические соображения
3.1.3.1. Система катушек с перпендикулярными осями
3.1.3.1. Система катушек с перпендикулярными осями
Рассмотрим более подробно взаимодействие датчика металлоискателя с металлической мишенью на примере системы катушек с перпендикулярными осями, рис.1 а. Для простоты рассмотрим систему с катушками, продольными размерами которых можно пренебречь. Будем в дальнейшем считать, что излучающая и приемная катушки представляют собой круглые бесконечно тонкие рамки (см. рис.3). Для такой рамки вектор магнитного момента при протекании тока I имеет вид:
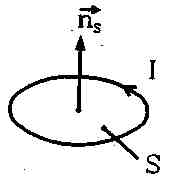
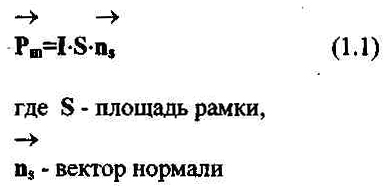
Рис.3. Модель излучающей катушки.
Индукция магнитного поля, создаваемого тауой рамкой на большом расстоянии г от ее центра (см. рис.4), составляет:
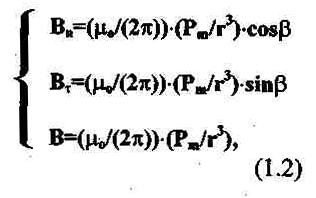
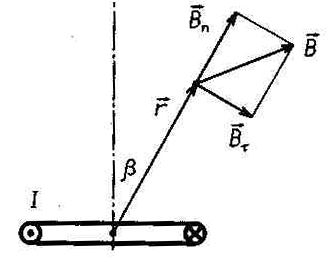
Рис. 4. Компоненты вектора индукции магнитного поля излучающей катушки.
полагая ,что r>>ЦS, а индексы "n" и "t" обозначают соответственно нормальную и тангенциальную составляющие вектора магнитной индукции.
Рассмотрим взаимодействие излучающей рамки, приемной рамки и объекта в случае катушек с перпендикулярными осями (см. рис.5).
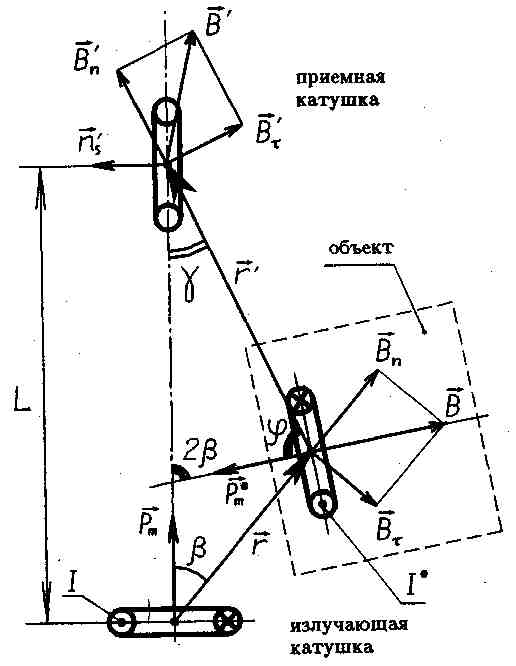
Рис. 5. Взаимное расположение катушек датчика металлоискателя и объекта (мишени).
Угол между осью симметрии системы катушек и вектором индукции поля В излучающей катушки равен 2р, так как силовые линии вследствие соотношений (1.2) являются окружностями, и ввиду допущения о малых размерах катушек:

где L - так называемая база датчика металлоискателя (см. рис.5).
Рис. 3. Модель излучающей катушки - формулы

Рис. 3. Модель излучающей катушки.

Рис. 4. Компоненты вектора индукции магнитного поля излучающей катушки.

Рис. 5. Взаимное расположение катушек датчика металлоискателя и объекта (мишени).

Ф. 1.2 Индукция магнитного поля

Ф. 1.3 Определение угла между осью симметрии системы катушек и вектором индукции поля В

3.1.3.2. Отражение сигнала за счет проводимости объекта
3.1.3.2. Отражение сигнала за счет проводимости объекта
Проводящий металлический объект, размеры которого пока будем также считать небольшими, по крайней мере, не превосходящими r и r' (см. рис.5), с точки зрения переизлучения магнитного поля, можно представить в виде эквивалентной рамки с токомI*, вектор магнитного момента которой Рm* практически параллелен вектору индукции излучающей катушки В.
Величина Рm* зависит от размеров проводящего объекта, его проводимости, от индукции поля в точке расположения объекта, от частоты излучаемого поля. Индукция поля переизлучения имеет в центре приемной катушки ненулевую составляющую Во в направлении вектора нормалиns', что приводит к появлению в этой катушке э.д.с., пропорциональной указанной составляющей:

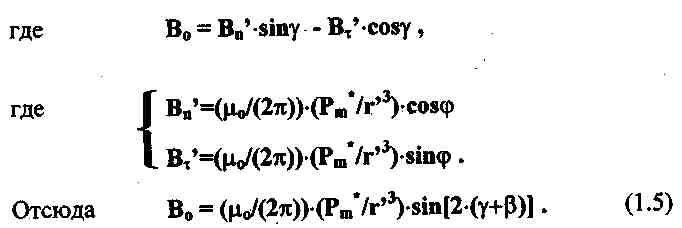
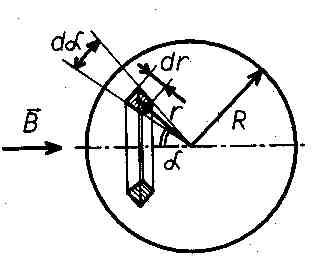
Рис. 6. К расчету магнитного момента эквивалентного шара.
Для того, чтобы вычислить магнитный момент эквивалентной рамкиРm*, необходимо взять интеграл по всему объему проводящего объекта так, чтобы просуммировать вклады всех элементарных кольцевых токов, наведенных полем излучающей катушки, в итоговую величину Рm*. Для простоты будем считать, что магнитное поле по всему объему проводящего объекта однородно, то есть он удален на значительное расстояние от излучающей катушки. Чтобы не возникало проблем с ориентацией объекта, будем пока считать, что он имеет форму однородного шара (см. рис.б). Считая, что проводящий объект удален на значительное расстояние и от приемной катушки, можно записать:

Пренебрегая явлением самоиндукции, влияние которого будет рассмотрено ниже, получаем:
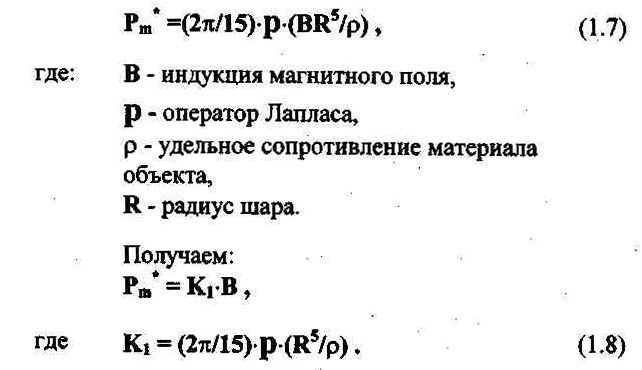
Чтобы учесть явление самоиндукции, предположим для простоты, что переизлученное поле однородновнутри объекта-мишени и, исходя из величины магнитного момента (1.7), составляет:

Подставив в выражение (1.7) В -В'внутр вместо В, получим по-прежнему пропорциональную зависимость Рm* отВ, но с несколько иным коэффициентом K1:
Составляющая индукции в центре приемной катушки:
В системе декартовых координат с началом в середине базы системы катушек (см. рис.7) последнее выражение принимает вид:

Введем нормированные координаты:

Определим с точностью до знака э.д.с., наводимую в приемной катушке:

где So - площадь сечения приемной катушки, N - количество ее витков.

где S - площадь сечения излучающей катушки, I - суммарный ток всех ее витков.
В трехмерном пространстве, когда плоскость XOY не перпендикулярна плоскости приемной рамки,
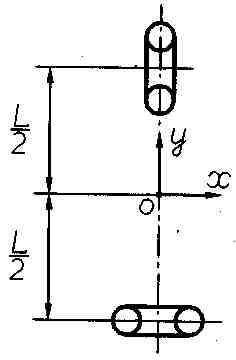
Рис. 7. Система координат.

Рис.8. Ориентация объекта по крену.
Рис. 6. К расчету магнитного момента эквивалентного шара.

Рис. 7. Система координат.

Рис.8. Ориентация объекта по крену.

Ф. 1.10 Составляющая индукции в центре приемной катушки

Ф. 1.13 В системе декартовых координат с началом в середине базы системы катушек

Ф. 1.14 С нормированными координатами

Ф. 1.15 Определение индукции поля

Ф. 1.17 ЭДС наводимая в приемной катушке
Ф. 1.18 ЭДС наводимая в приемной катушке

Ф. 1.20 Определение ЭДС

Ф. 1.4 Индукция поля переизлучения
Ф. 1.5 Магнитный момент

Ф. 1.6 Магнитный момент удаленный на значительное расстояние

Ф. 1.7 Магнитный момент без учета явления самоиндукции

Ф. 1.8 Переизлученное поле однородно внутри объекта-мишени

Ф. 1.9 Магнитный момент

3.1.3.3.Отражение сигнала за счет ферромагнитных свойств объекта
3.1.3.3.Отражение сигнала за счет ферромагнитных свойств объекта
Ферромагнитный объект, размеры которого будем считать также небольшими, по крайней мере, не превосходящими r и rў (см. рис.5), с точки зрения искривления магнитного поля, можно представить в виде эквивалентной рамки с током I*, вектор магнитного момента которойРm*практически параллелен вектору индукции излучающей катушки В.
Величина Рm* зависит от размеров ферромагнитного объекта, его магнитной проницаемости, от индукции поля в точке расположения объекта. Для того, чтобы вычислить магнитный момент эквивалентной рамки Рm*, необходимо взять интеграл по всему объему ферромагнитного объекта так, чтобы просуммировать вклады всех амперовых токов, возникающих в ферромагнетике под действием внешнего поля излучающей катушки.Для шарового однородного объекта получим:

где В - индукция магнитного поля, m - магнитная проницаемость материала объекта, R - радиус объекта - шара.
Все выражения, полученные выше для проводящего объекта, останутся в силе, если в них для данного случая положить:

Ф.1 Сумма всех амперовых токов, возникающих в ферромагнетике под действием внешнего поля излучающей катушки для шарового однород

Ф.2 Преобразованная формула

3.1.3.4.Суперпозиция проводящих и ферромагнитных свойств объекта
3.1.3.4.Суперпозиция проводящих и ферромагнитных свойств объекта
Учет одновременно электропроводных и ферромагнитных свойств объекта в виде шара приводит к следующему значению коэффициента K1:
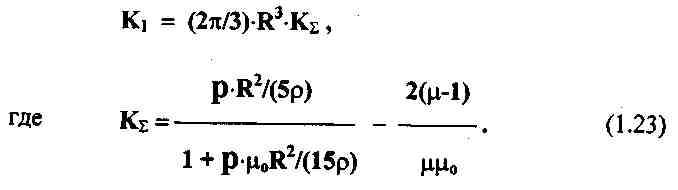
Нормирующий коэффициент К4, входящий в выражение для напряжения в приемной катушке, составляет:

Численная оценка (1.23) показывает, например, что модули слагаемых в выражении при типовой частоте излучаемого поля 10(кГц) становятся соизмеримы при радиусе шарового объекта порядка 1(см) и при условии наличия у объекта ферромагнитных свойств. Кроме того, зависимость первого слагаемого от оператора Лапласа говорит о том, что фаза отраженного сигнала будет изменяться в зависимости от соотношения у объекта - мишени электропроводных и ферромагнитных свойств, а также от проводимости материала и размеров объекта. На этом явлении основан принцип действия дискриминаторов современных металлоискателей, то есть электронных устройств, позволяющих по фазовому сдвигу отраженного от объекта сигнала оценить свойства объекта (с определенной вероятностью даже тип металла).
Ф.1 Учет электропроводных и ферромагнитных свойств объекта в виде шара

Ф.2 Расчет нормирующего коэффициента

3.1.3.5.Учет формы объекта
3.1.3.5.Учет формы объекта
Полученные ранее выражения, как указывалось, были справедливы только для формы объекта - мишени в виде однородного шара. Очевидно, что воздействие объектов более сложной формы можно свести к воздействию некоторого эквивалентного шара с радиусом Rэкв.
Наведенное в приемной катушке напряжение, обусловленное проявлением только ферромагнитных свойств, для шарового объекта пропорционально его объему (см. выражение (1.22)). Поэтому, для не слишком протяженных объектов более сложной формы, в первом приближении, можно считать эквивалентным такой шар, объем которого совпадает с объемом ферромагнетика у объекта сложной формы. Для этого случая:

где V - объем ферромагнетика.
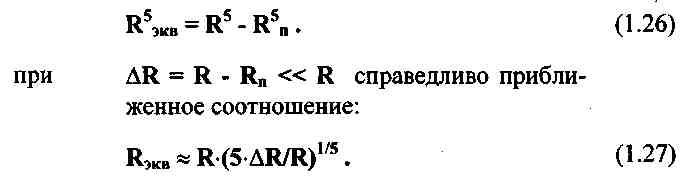
С напряжением, наведенным в приемной катушке за счет переизлучения от проводящего объекта, ситуация более сложная. В случае больших объектов с хорошей электропроводностью выражение (1.9) и соответственно наведенное в приемной катушке напряжение также пропорционально объему объекта (то естьR^3) и радиус эквивалентного шара также вычисляется по формуле (1.25). В случае небольших объектов с плохой электропроводностью подход иной. В этом случае общее выражение (1.9) вырождается в частный случай (1.8). Рассмотрим вначале влияние шаровой полости с радиусом Rп внутри шарового объекта на Rэкв. Воспользовавшись принципом суперпозиции, представим результат воздействия шарового объекта с полостью как разность результатов воздействия сплошного шара и шара с радиусом Rп. В соответствии с (1.8), имеет место соотношение:
На рис.9 приведены графики зависимости R/Rэкв от R/DR для полого слабоэлектропроводного и для полого ферромагнитного шара. Из графика видно, что для не
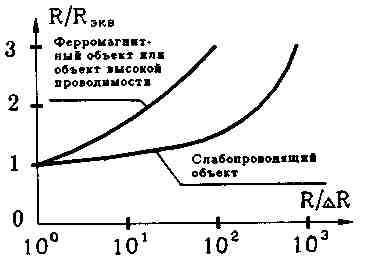
Рис.9. Влияние толщины стенки полого шара на эквивалентный радиус.
слишком тонкостенных шаров из слабопроводящего материала Rэкв»R. Следовательно, в отличие от ферромагнитного шара и от шара высокой проводимости, для слабопроводящего шара, в первом приближении, безразлично сплошной он или полый. Его влияние на процесс переизлучения определяется, в основном, линейным размером, то есть R. Поэтому, в случае не слишком протяженных плохопроводящих объектов более сложной формы, в том числе и полой, в первом приближении, можно считать эквивалентным такой шар, радиусRэкв которого равен половине среднего характерного размера объекта.
Приведенный выше вывод хорошо подтверждается на практике в виде существенного отклика металлоискателя от ничтожных по массе обрывков металлической алюминиевой фольги, которая практически попадается везде, где оставила свой след современная цивилизация.
Рис.9. Влияние толщины стенки полого шара на эквивалентный радиус.

Ф. 1.25 Расчет воздействия некоторого эквивалентного шара с радиусом Rэкв
Ф. 1.26 Влияние шаровой полости с радиусом Rп внутри шарового объекта на Rэкв

3.1.3.6.Система катушек со скрещенными осями
3.1.3.6.Система катушек со скрещенными осями
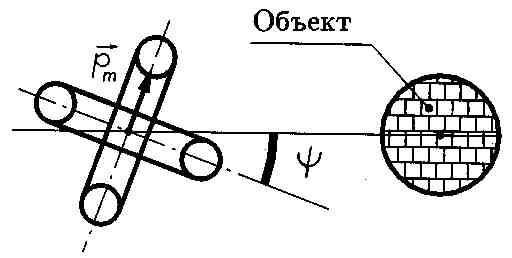
Рис. 10. Ориентация датчика по крену.
Вид вдоль оси датчика металлоискателя при таком расположении катушек приведен на рис.10. Для расчета такой схемы удобно воспользоваться принципом суперпозиции и разложить вектор магнитного момента излучающей катушки и площадь приемной катушки на вертикальную и горизонтальную составляющие (проекции, см. рис.11).
Для горизонтальной составляющей, проекция индукции поля в приемной катушке Вон будет попрежнему определяться соотношением (1.4). Однако, иная ориентация магнитного момента дает (с точностью до знака) результат:

где К2 определяется по формуле (1.11).
Вертикальная составляющая индукции поля в приемной катушкеBov перпендикулярна векторамr и r' и не зависит в явном виде от углов g и b:
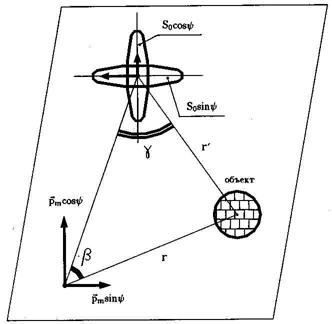
Рис.11. Разложение магнитного момента и площади приемной катушки на составляющие.

ЭДС в приемной катушке Uo , с точностью до знака, составляет:

Отсюда получаем:

В декартовой системе координат с началом в середине базы системы катушек (см. рис.5) получим:

Введя нормированные координаты (1.14), получим:
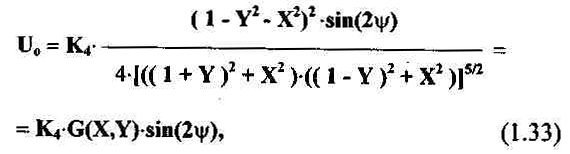
где К4 вычисляется по формуле (1.19) или (1.24).
Рис. 10. Ориентация датчика по крену.

Рис.11. Разложение магнитного момента и площади приемной катушки на составляющие.

Ф. 1.28 Проекция индукции поля в приемной катушке

Ф. 1.29 Вертикальная составляющая индукции поля в приемной катушке

Ф. 1.30 ЭДС в приемной катушке Uo

Ф. 1.31 ЭДС в приемной катушке Uo

Ф. 1.32 ЭДС в приемной катушке Uo в декартовой системе координат с началом в середине базы системы катушек

Ф. 1.33 ЭДС в приемной катушке с нормированными резуьтатами
