3. Типы металлоискателей
3. ТИПЫ МЕТАЛЛОИСКАТЕЛЕЙ
3.1 Металлоискатель по принципу "передача-прием"
3.1 МЕТАЛЛОИСКАТЕЛЬ ПО ПРИНЦИПУ "ПЕРЕДАЧА-ПРИЕМ"
Термины "передача-прием" и "отраженный сигнал" в различных поисковых приборах обычно ассоциируются с методами типа импульсной эхо- и радиолокации, что является источником заблуждений, когда речь заходит о металлоискателях. В отличие от различного рода локаторов, в металлоискателях рассматриваемого типа как передаваемый сигнал (излучаемый), так и принимаемый сигнал (отраженный) являются непрерывными, они существуют одновременно и совпадают по частоте.
3.1.1. Принцип действия
3.1.1. Принцип действия
Принцип действия металлоискателей типа "передача-прием" заключается в регистрации сигнала, отраженного (или, как говорят, переизлученного) металлическим предметом (мишенью), см. [32], стр.225-228. Отраженный сигнал возникает вследствие воздействия на мишень переменного магнитного поля передающей (излучающей) катушки металлоискателя. Таким образом, прибор данного типа подразумевает наличие как минимум двух катушек, одна из которых является передающей, а другая приемной.
Основная принципиальная проблема, которая решается в металлоискателях данного типа, заключается в таком выборе взаимного расположения катушек, при котором магнитное поле излучающей катушки в отсутствие посторонних металлических предметов наводит нулевой сигнал в приемной катушке (или в системе приемных катушек). Таким образом, необходимо предотвратить непосредственное воздействие излучающей катушки на приемную. Появление же вблизи катушек металлической мишени приведет к появлению сигнала в виде переменной э.д.с. в приемной катушке.
3.1.2. Схемы датчиков
3.1.2. Схемы датчиков
Поначалу может показаться, что в природе существует всего два варианта взаимного расположения катушек, при котором не происходит непосредственной передачи сигнала из одной катушки в другую (см. рис.1 а и 16) - катушки с перпендикулярными и со скрещивающимися осями.
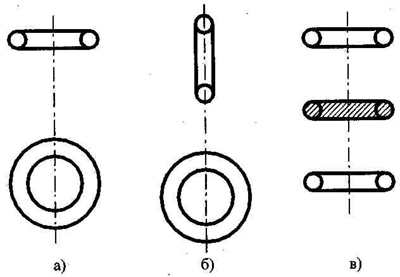
Рис. 1. Варианты взаимного расположения катушек датика металлоискателя по принципу "передача-прием ".
Более тщательное изучение проблемы показывает, что подобных различных систем датчиков металлоискателей может быть сколь угодно много, однако они будут содержать более сложные системы с количеством катушек больше двух, соответствующим образом включенных электрически. Например, на рис.1 в изображена система из одной излучающей (в центре) и двух приемных катушек, включенных встречно по сигналу, наводимому излучающей катушкой. Таким образом, сигнал на выходе системы приемных катушек в идеале равен нулю, так как наводимые в катушках э.д.с. взаимно компенсируются.
Особый интерес представляют системы датчиков с компланарными катушками (т.е. расположенными в одной плоскости). Это объясняется тем, что с помощью металлоискателей обычно проводят поиск предметов, находящихся в земле, а приблизить датчик на минимальное расстояние к поверхности земли возможно только в том случае, если его катушки компланарны. Кроме того такие датчики обычно компактны и хорошо вписываются в защитные корпуса типа "блина" или "летающей тарелки".
Основные варианты взаимного расположения компланарных катушек приведены на рис.2а и 26. В схеме на рис.2а взаимное расположение катушек выбрано таким, чтобы суммарный поток вектора магнитной индукции через поверхность, ограниченную приемной катушкой, равнялся нулю. В схеме рис.26 одна из катушек (приемная) скручена в виде "восьмерки", так что суммарная э.д.с., наводимая на половинки витков приемной катушки, расположенные в одном крыле "восьмерки", компенсирует аналогичную суммарную э.д.с., наводимую в другом крыле "восьмерки".

Рис. 2. Компланарные варианты взаимного расположения катушек металлоискателя по принципу "передача-прием ".
Возможны и другие разнообразные конструкции датчиков с компланарньми катушками, например рис.2в. Приемная катушка расположена внутри излучающей. Наводимая в приемной катушке э.д.с. компенсируется специальным трансформаторным устройством, отбирающим часть сигнала излучающей катушки.
Рис. 1. Варианты взаимного расположения катушек датика металлоискателя по принципу "передача-прием ".

Рис. 2. Компланарные варианты взаимного расположения катушек металлоискателя по принципу "передача-прием ".

3.1.3. Теоретические соображения
3.1.3. Теоретические соображения
3.1.3.1. Система катушек с перпендикулярными осями
3.1.3.1. Система катушек с перпендикулярными осями
Рассмотрим более подробно взаимодействие датчика металлоискателя с металлической мишенью на примере системы катушек с перпендикулярными осями, рис.1 а. Для простоты рассмотрим систему с катушками, продольными размерами которых можно пренебречь. Будем в дальнейшем считать, что излучающая и приемная катушки представляют собой круглые бесконечно тонкие рамки (см. рис.3). Для такой рамки вектор магнитного момента при протекании тока I имеет вид:
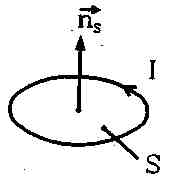
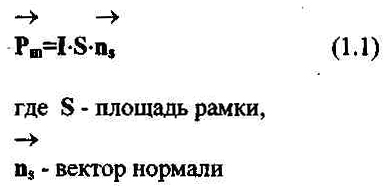
Рис.3. Модель излучающей катушки.
Индукция магнитного поля, создаваемого тауой рамкой на большом расстоянии г от ее центра (см. рис.4), составляет:
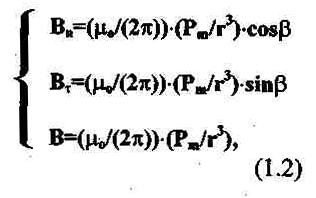
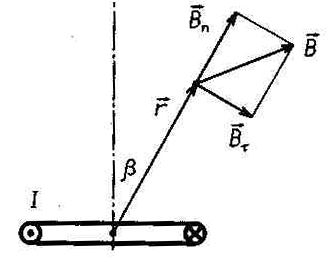
Рис. 4. Компоненты вектора индукции магнитного поля излучающей катушки.
полагая ,что r>>ЦS, а индексы "n" и "t" обозначают соответственно нормальную и тангенциальную составляющие вектора магнитной индукции.
Рассмотрим взаимодействие излучающей рамки, приемной рамки и объекта в случае катушек с перпендикулярными осями (см. рис.5).
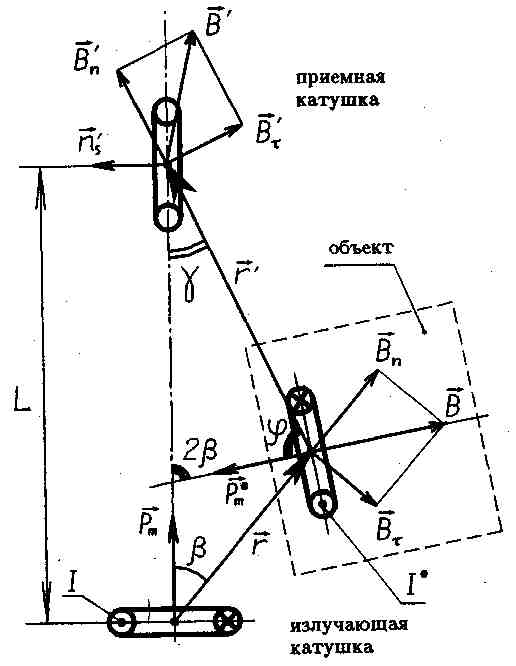
Рис. 5. Взаимное расположение катушек датчика металлоискателя и объекта (мишени).
Угол между осью симметрии системы катушек и вектором индукции поля В излучающей катушки равен 2р, так как силовые линии вследствие соотношений (1.2) являются окружностями, и ввиду допущения о малых размерах катушек:

где L - так называемая база датчика металлоискателя (см. рис.5).
Рис. 3. Модель излучающей катушки - формулы

Рис. 3. Модель излучающей катушки.

Рис. 4. Компоненты вектора индукции магнитного поля излучающей катушки.

Рис. 5. Взаимное расположение катушек датчика металлоискателя и объекта (мишени).

Ф. 1.2 Индукция магнитного поля

Ф. 1.3 Определение угла между осью симметрии системы катушек и вектором индукции поля В

3.1.3.2. Отражение сигнала за счет проводимости объекта
3.1.3.2. Отражение сигнала за счет проводимости объекта
Проводящий металлический объект, размеры которого пока будем также считать небольшими, по крайней мере, не превосходящими r и r' (см. рис.5), с точки зрения переизлучения магнитного поля, можно представить в виде эквивалентной рамки с токомI*, вектор магнитного момента которой Рm* практически параллелен вектору индукции излучающей катушки В.
Величина Рm* зависит от размеров проводящего объекта, его проводимости, от индукции поля в точке расположения объекта, от частоты излучаемого поля. Индукция поля переизлучения имеет в центре приемной катушки ненулевую составляющую Во в направлении вектора нормалиns', что приводит к появлению в этой катушке э.д.с., пропорциональной указанной составляющей:

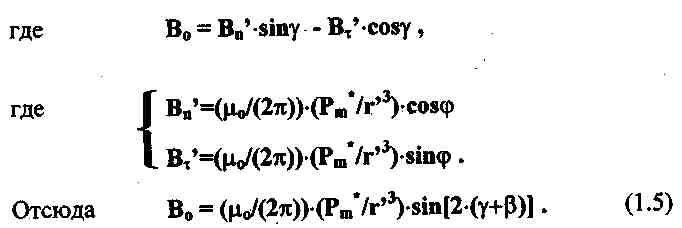
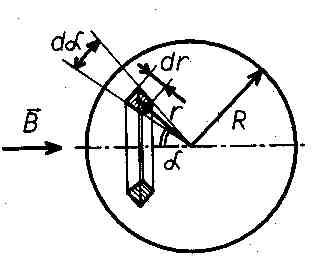
Рис. 6. К расчету магнитного момента эквивалентного шара.
Для того, чтобы вычислить магнитный момент эквивалентной рамкиРm*, необходимо взять интеграл по всему объему проводящего объекта так, чтобы просуммировать вклады всех элементарных кольцевых токов, наведенных полем излучающей катушки, в итоговую величину Рm*. Для простоты будем считать, что магнитное поле по всему объему проводящего объекта однородно, то есть он удален на значительное расстояние от излучающей катушки. Чтобы не возникало проблем с ориентацией объекта, будем пока считать, что он имеет форму однородного шара (см. рис.б). Считая, что проводящий объект удален на значительное расстояние и от приемной катушки, можно записать:

Пренебрегая явлением самоиндукции, влияние которого будет рассмотрено ниже, получаем:
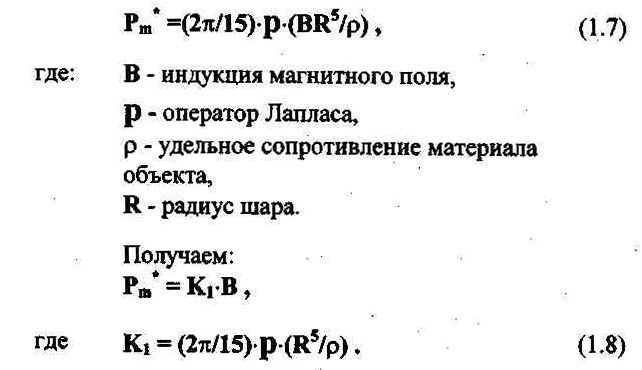
Чтобы учесть явление самоиндукции, предположим для простоты, что переизлученное поле однородновнутри объекта-мишени и, исходя из величины магнитного момента (1.7), составляет:

Подставив в выражение (1.7) В -В'внутр вместо В, получим по-прежнему пропорциональную зависимость Рm* отВ, но с несколько иным коэффициентом K1:
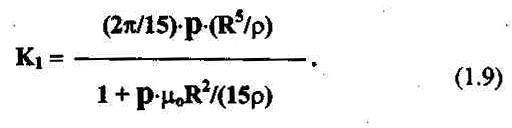
Составляющая индукции в центре приемной катушки:
В системе декартовых координат с началом в середине базы системы катушек (см. рис.7) последнее выражение принимает вид:

Введем нормированные координаты:

Определим с точностью до знака э.д.с., наводимую в приемной катушке:

где So - площадь сечения приемной катушки, N - количество ее витков.

где S - площадь сечения излучающей катушки, I - суммарный ток всех ее витков.
В трехмерном пространстве, когда плоскость XOY не перпендикулярна плоскости приемной рамки,
Рис. 7. Система координат.

Рис.8. Ориентация объекта по крену.
Рис. 6. К расчету магнитного момента эквивалентного шара.

Рис. 7. Система координат.

Рис.8. Ориентация объекта по крену.

Ф. 1.10 Составляющая индукции в центре приемной катушки

Ф. 1.13 В системе декартовых координат с началом в середине базы системы катушек

Ф. 1.14 С нормированными координатами

Ф. 1.15 Определение индукции поля

Ф. 1.17 ЭДС наводимая в приемной катушке
Ф. 1.18 ЭДС наводимая в приемной катушке

Ф. 1.20 Определение ЭДС

Ф. 1.4 Индукция поля переизлучения
Ф. 1.5 Магнитный момент

Ф. 1.6 Магнитный момент удаленный на значительное расстояние

Ф. 1.7 Магнитный момент без учета явления самоиндукции

Ф. 1.8 Переизлученное поле однородно внутри объекта-мишени

Ф. 1.9 Магнитный момент

3.1.3.3.Отражение сигнала за счет ферромагнитных свойств объекта
3.1.3.3.Отражение сигнала за счет ферромагнитных свойств объекта
Ферромагнитный объект, размеры которого будем считать также небольшими, по крайней мере, не превосходящими r и rў (см. рис.5), с точки зрения искривления магнитного поля, можно представить в виде эквивалентной рамки с током I*, вектор магнитного момента которойРm*практически параллелен вектору индукции излучающей катушки В.
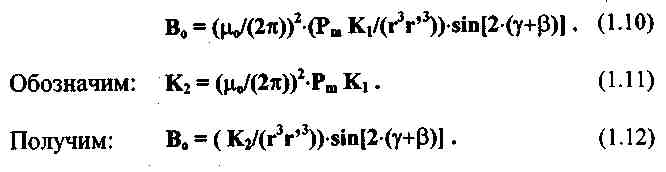
Величина Рm* зависит от размеров ферромагнитного объекта, его магнитной проницаемости, от индукции поля в точке расположения объекта. Для того, чтобы вычислить магнитный момент эквивалентной рамки Рm*, необходимо взять интеграл по всему объему ферромагнитного объекта так, чтобы просуммировать вклады всех амперовых токов, возникающих в ферромагнетике под действием внешнего поля излучающей катушки.Для шарового однородного объекта получим:

где В - индукция магнитного поля, m - магнитная проницаемость материала объекта, R - радиус объекта - шара.
Все выражения, полученные выше для проводящего объекта, останутся в силе, если в них для данного случая положить:

Ф.1 Сумма всех амперовых токов, возникающих в ферромагнетике под действием внешнего поля излучающей катушки для шарового однород

Ф.2 Преобразованная формула

3.1.3.4.Суперпозиция проводящих и ферромагнитных свойств объекта
3.1.3.4.Суперпозиция проводящих и ферромагнитных свойств объекта
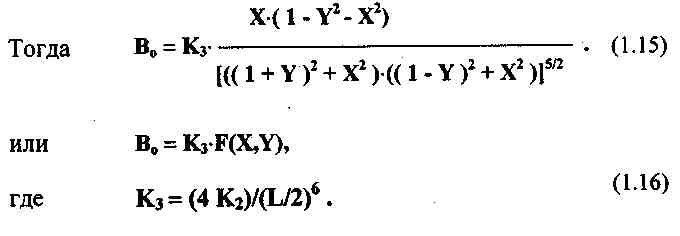
Учет одновременно электропроводных и ферромагнитных свойств объекта в виде шара приводит к следующему значению коэффициента K1:
Нормирующий коэффициент К4, входящий в выражение для напряжения в приемной катушке, составляет:

Численная оценка (1.23) показывает, например, что модули слагаемых в выражении при типовой частоте излучаемого поля 10(кГц) становятся соизмеримы при радиусе шарового объекта порядка 1(см) и при условии наличия у объекта ферромагнитных свойств. Кроме того, зависимость первого слагаемого от оператора Лапласа говорит о том, что фаза отраженного сигнала будет изменяться в зависимости от соотношения у объекта - мишени электропроводных и ферромагнитных свойств, а также от проводимости материала и размеров объекта. На этом явлении основан принцип действия дискриминаторов современных металлоискателей, то есть электронных устройств, позволяющих по фазовому сдвигу отраженного от объекта сигнала оценить свойства объекта (с определенной вероятностью даже тип металла).
Ф.1 Учет электропроводных и ферромагнитных свойств объекта в виде шара

Ф.2 Расчет нормирующего коэффициента

3.1.3.5.Учет формы объекта
3.1.3.5.Учет формы объекта
Полученные ранее выражения, как указывалось, были справедливы только для формы объекта - мишени в виде однородного шара. Очевидно, что воздействие объектов более сложной формы можно свести к воздействию некоторого эквивалентного шара с радиусом Rэкв.
Наведенное в приемной катушке напряжение, обусловленное проявлением только ферромагнитных свойств, для шарового объекта пропорционально его объему (см. выражение (1.22)). Поэтому, для не слишком протяженных объектов более сложной формы, в первом приближении, можно считать эквивалентным такой шар, объем которого совпадает с объемом ферромагнетика у объекта сложной формы. Для этого случая:

где V - объем ферромагнетика.
С напряжением, наведенным в приемной катушке за счет переизлучения от проводящего объекта, ситуация более сложная. В случае больших объектов с хорошей электропроводностью выражение (1.9) и соответственно наведенное в приемной катушке напряжение также пропорционально объему объекта (то естьR^3) и радиус эквивалентного шара также вычисляется по формуле (1.25). В случае небольших объектов с плохой электропроводностью подход иной. В этом случае общее выражение (1.9) вырождается в частный случай (1.8). Рассмотрим вначале влияние шаровой полости с радиусом Rп внутри шарового объекта на Rэкв. Воспользовавшись принципом суперпозиции, представим результат воздействия шарового объекта с полостью как разность результатов воздействия сплошного шара и шара с радиусом Rп. В соответствии с (1.8), имеет место соотношение:
На рис.9 приведены графики зависимости R/Rэкв от R/DR для полого слабоэлектропроводного и для полого ферромагнитного шара. Из графика видно, что для не
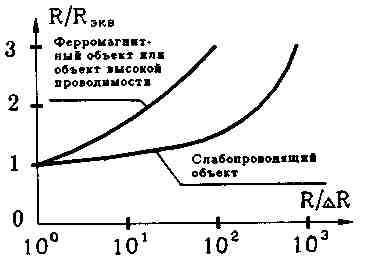
Рис.9. Влияние толщины стенки полого шара на эквивалентный радиус.
слишком тонкостенных шаров из слабопроводящего материала Rэкв»R. Следовательно, в отличие от ферромагнитного шара и от шара высокой проводимости, для слабопроводящего шара, в первом приближении, безразлично сплошной он или полый. Его влияние на процесс переизлучения определяется, в основном, линейным размером, то есть R. Поэтому, в случае не слишком протяженных плохопроводящих объектов более сложной формы, в том числе и полой, в первом приближении, можно считать эквивалентным такой шар, радиусRэкв которого равен половине среднего характерного размера объекта.
Приведенный выше вывод хорошо подтверждается на практике в виде существенного отклика металлоискателя от ничтожных по массе обрывков металлической алюминиевой фольги, которая практически попадается везде, где оставила свой след современная цивилизация.
Рис.9. Влияние толщины стенки полого шара на эквивалентный радиус.

Ф. 1.25 Расчет воздействия некоторого эквивалентного шара с радиусом Rэкв
Ф. 1.26 Влияние шаровой полости с радиусом Rп внутри шарового объекта на Rэкв

3.1.3.6.Система катушек со скрещенными осями
3.1.3.6.Система катушек со скрещенными осями
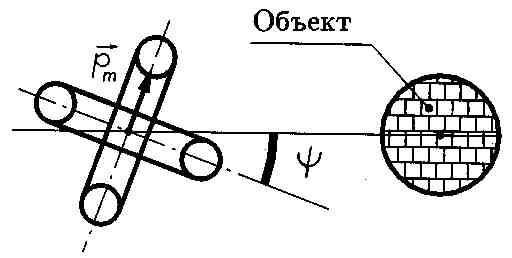
Рис. 10. Ориентация датчика по крену.
Вид вдоль оси датчика металлоискателя при таком расположении катушек приведен на рис.10. Для расчета такой схемы удобно воспользоваться принципом суперпозиции и разложить вектор магнитного момента излучающей катушки и площадь приемной катушки на вертикальную и горизонтальную составляющие (проекции, см. рис.11).
Для горизонтальной составляющей, проекция индукции поля в приемной катушке Вон будет попрежнему определяться соотношением (1.4). Однако, иная ориентация магнитного момента дает (с точностью до знака) результат:

где К2 определяется по формуле (1.11).
Вертикальная составляющая индукции поля в приемной катушкеBov перпендикулярна векторамr и r' и не зависит в явном виде от углов g и b:
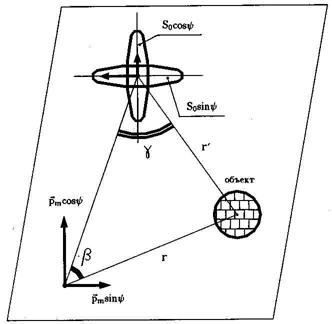
Рис.11. Разложение магнитного момента и площади приемной катушки на составляющие.

ЭДС в приемной катушке Uo , с точностью до знака, составляет:

Отсюда получаем:

В декартовой системе координат с началом в середине базы системы катушек (см. рис.5) получим:

Введя нормированные координаты (1.14), получим:
где К4 вычисляется по формуле (1.19) или (1.24).
Рис. 10. Ориентация датчика по крену.

Рис.11. Разложение магнитного момента и площади приемной катушки на составляющие.

Ф. 1.28 Проекция индукции поля в приемной катушке

Ф. 1.29 Вертикальная составляющая индукции поля в приемной катушке

Ф. 1.30 ЭДС в приемной катушке Uo

Ф. 1.31 ЭДС в приемной катушке Uo

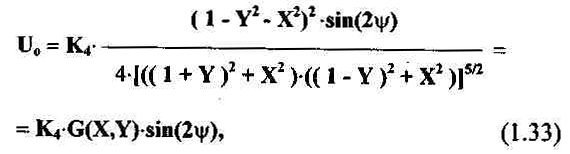
Ф. 1.32 ЭДС в приемной катушке Uo в декартовой системе координат с началом в середине базы системы катушек

Ф. 1.33 ЭДС в приемной катушке с нормированными резуьтатами

3.1.4. Практические соображения
3.1.4. Практические соображения
Чувствительность металлоискателя зависит, в первую очередь от его датчика. Для рассмотренных вариантов датчиков чувствительность определяется формулами (1.20) и (1.33). При оптимальной для каждого случая ориентации ориентации датчика на объект по углу крена y, она определяется одним и тем же коэффициентом K4 и функциями нормированных координат F(X,Y) иG(X,Y). Для сравнения, в квадрате ХО[-4,4], YО[-4,4], модули этих функций приведены в виде аксонометрического набора сечений в логарифмическом масштабе на рис.12 и рис.13.
Первое, что бросается в глаза - это ярко выраженные максимумы вблизи точек расположения катушек датчика (0,+1) и (0,-1). Максимумы функций F(X,Y) иG(X,Y) не представляют практического интереса и для удобства сравнения функций обрезаны по уровню 0(дБ). Из рисунков и из анализа функций F(X,Y) иG(X,Y) также видно, что в указанном квадрате модуль функции F практически везде немного превосходит модуль функции G, за исключением самых удаленных точек по углам квадрата и за исключением узкой области вблизи Х=0, где у функции F имеет место "овраг".
Асимптотическое поведение указанных функций вдали от начала координат можно проиллюстрировать при Y=0. Оказывается, что модуль функции F убывает с расстоянием пропорционально х^(-7), а модуль функции G - пропорционально х^(-6). К сожалению, преимущество функции G по чувствительности проявляется лишь на больших расстояниях, превышающих практический радиус действия
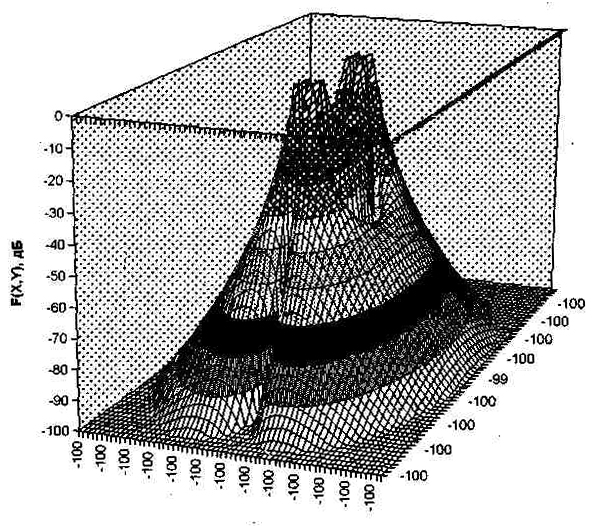
Рис. 12. График функции F(X,Y).
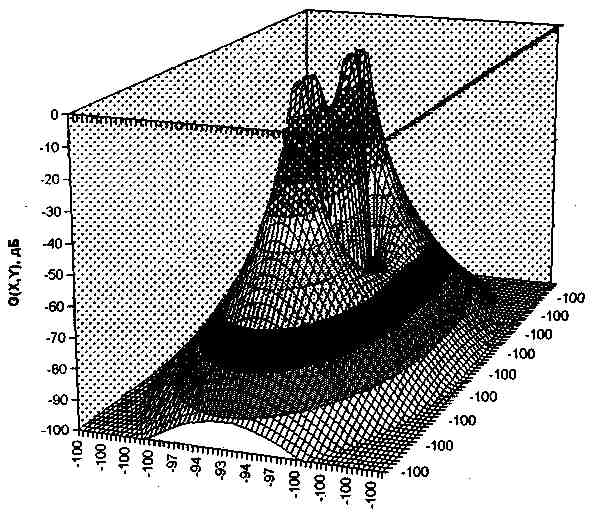
Рис.13. График функции G(X,Y).
металлоискателя. Одинаковые значения модулей F и G получаются при Х»4,25.
Очень важное практическое значение имеет "овраг" функцииF. Во-первых, он свидетельствует о том, что датчик системы катушек с перпендикулярными осями имеет минимальную (теоретически нулевую) чувствительность к металлическим предметам, расположенным на его продольной оси. Естественно, к этим предметам относятся и многие элементы конструкции самого датчика. Следовательно, отраженный от них бесполезный сигнал будет намного меньше, чем у датчика системы катушек со скрещивающимися осями. Последнее очень важно, учитывая, что отраженный сигнал от металлических элементов самого датчика может на несколько порядков превосходить полезный сигнал (ввиду близости этих элементов к катушкам датчика). Дело не в том, что бесполезный сигнал от металлических элементов конструкции датчика трудно скомпенсировать. Основная сложность заключается в малейших изменениях этих сигналов, которые обычно вызываются тепловыми и особенно механическими деформациями указанных элементов. Эти малейшие изменения могут быть уже сопоставимы с полезным сигналом, что приведет к неверным показаниям или ложным срабатываниям прибора.Во-вторых, если с помощью металлоискателя системы катушек с перпендикулярными осями некоторый небольшой объект уже обнаружен, то направление его точного местонахождения может быть легко "запеленговано" по нулевому значению сигнала металлоискателя при точной ориентации его продольной оси на объект (при любых ориентациях по крену). Учитывая, что площадь "захвата" датчика при поиске может составлять несколько квадратньк метров, последнее качество системы катушек с перпендикулярными осями весьма полезно на практике (меньше бесполезных раскопок).
Следующая особенность графиков функцийF(X,Y) и G(X,Y) - наличие кольцеобразного "кратера" нулевой чувствительности, проходящего через центры катушек (окружность единичноо радиуса с центром в точке (0,0)). На практике эта особенность позволяет определять расстояние до небольших объектов. Если обнаружится, что на некотором конечном расстоянии отраженный сигнал зануляется (при оптимальной ориентации по крену) - значит, расстояние до объекта составляет половину базы прибора, то есть величину L/2.
Необходимо также отметить, чтодиаграммы направленности по углу крена y для датчиков металлоискателей с различным взаимным расположением катушек также различаются. На рис.14б приведена диаграмма направленности прибора с перпендикулярньми осями у катушек, а на рис.14а - со скрещивающимися. Очевидно, что вторая диаграмма более предпочтительна, так имеет меньшее количество зон нечувствительности по крену и меньшее количество лепестков.
Для того, чтобы оценить зависимость наведенного в приемной катушке напряжения от параметров металлоискателя и объекта, надо проанализировать выражение (1.19) для коэффициента К4. Наведенное в приемной катушке напряжение пропорционально (L/2)^6. На величину L/2 нормируются и аргументы функций F и G, убывание которых происходит с 6-й - 7-й степенью расстояния. Поэтому, в первом приближении, при прочих равных условиях,чувствительность металлоискателя не зависит от его базы.
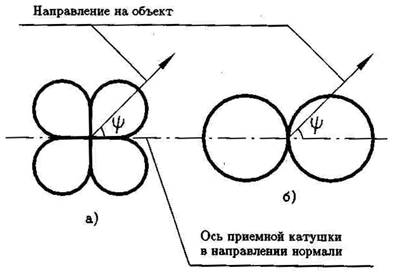
Рис.14. Диаграммы направленности по крену датчиков систем катушек:
- со скрещивающимися осями (а)
- с перпендикулярными осями (б).
Однако, в некоторых случаях конструкция датчика с большей базой может оказаться более предпочтительной, так как в этом случае меньшим будет неизбежное паразитное проникновение сигнала непосредственно из излучающей катушки в приемную.
Для того, чтобы проанализировать селективность металлоискателя, то есть его способность различать объекты, изготовленные из различных металлов или сплавов, необходимо обратиться к выражению (1.23). Металлоискатель может различать объекты по фазе отраженного сигнала. Для того, чтобы разрешающая способность прибора по типу металлов была максимальной, необходимо соответствующим образом выбрать частоту сигнала излучающей катушки, так, чтобы фаза отраженного от объектов сигнала составляла около 45°. Это - середина диапазона возможных изменений фазы первого слагаемого выражения (1.23), и там крутизна фазочастотной характеристики максимальна. Второе слагаемое выражения (1.23) считаем нулевым, так как при поиске в первую очередь нас интересует селективность по цветным металлам - неферромагнетикам. Естественно, оптимальный выбор частоты сигнала подразумевает знание типового размера предполагаемых объектов. Практически во всех зарубежных промышленных металлоискателях в качестве такого размера заложен размер монеты. Оптимальная частота составляет:

При типовом диаметре монеты 25(мм) ее объем составляет около 10^(-6) (м^3), что по формуле (1.25) соответствует эквивалентному радиусу около 0,6(см). Отсюда получаем оптимальное значение частоты около 1(кГц) при проводимости материала монеты 20(н0мЧм). В промышленных приборах частота обычно на порядок выше (по технологическим соображениям).
Рис. 12. График функции F(X,Y).

Рис.13. График функции G(X,Y).

Рис.14. Диаграммы направленности по крену датчиков систем катушек:

Ф. 1.34 Оптимальная частота

3.1.5. Выводы
3.1.5. Выводы
1. По мнению автора, система катушек с перпендикулярными осями предпочтительнее для поиска кладов и реликвий, чем система катушек со скрещивающимися осями. При прочих равных условиях, первая система имеет чувствительность немного выше . Кроме того, с ее помощью гораздо проще определить ("запеленговать") точное направление, в котором следует искать обнаруженный объект.
2. Рассмотренные системы катушек имеют важное свойство, позволяющее оценивать расстояние до небольших объектов по занулению отраженного сигнала при расстоянии до объекта, равном половине базы.
3. При прочих равных условиях (размеры и число витков катушек, чувствительность приемного тракта, величина тока и его частота в излучающей катушке), чувствительность металлоискателя по принципу "передача-прием" практически не зависит от его базы, то есть от расстояния между катушками.
3.2 Металлоискатель на биениях
3.2 МЕТАЛЛОИСКАТЕЛЬ НА БИЕНИЯХ
Термин "металлоискатель на биениях" является отголоском терминологии, принятой в радиотехнике еще со времен первых супергетеродинных приемников. Биениями называется явление, наиболее заметно проявляющееся при сложении двух периодических сигналов с близкими частотами и приблизительно одинаковыми амплитудами и заключающееся в пульсации амплитуды суммарного сигнала. Частота пульсации равна разности частот двух складываемых сигналов. Пропустив такой пульсирующий сигнал через выпрямитель (детектор), можно выделить сигнал разностной частоты. Такая схемотехника долгое время была традиционной, однако в настоящее время, ввиду развития синхронных детекторов, обычно не используется ни в радиотехнике, ни в металлоискателях, хотя термин "на биениях" остался до сих пор.
3.2.1. Принцип действия
3.2.1. Принцип действия
Принцип действия металлоискателя на биениях очень прост и заключается в регистрации разности частот от двух генераторов - один из которых является стабильным по частоте, а другой содержит датчик - катушку индуктивности в своей частотозадающей цепи. Прибор настраивается таким образом, чтобы в отсутствие металла вблизи датчика частоты двух генераторов совпадали или были очень близки по значению. Наличие металла вблизи датчика приводит к изменению его параметров и как следствие, к изменению частоты соответствующего генератора. Это изменение, как правило очень мало, однако изменение разности частот двух генераторов уже существенно и может быть легко зарегистрировано.
Разность частот может регистрироваться самыми различными путями, начиная от простейшего, когда сигнал разностной частоты прослушивается на головные телефоны или через громкоговоритель, и кончая цифровыми способами измерения частоты.
3.2.2. Теоретические соображения
3.2.2. Теоретические соображения
Рассмотрим подробнее датчик металлоискателя на биениях, состоящий из одной катушки (см. рис.15).
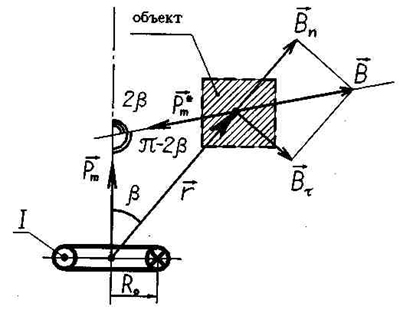
Рис. 15. Взаимодействие однокатушечного датчика металлоискателя с объектом.
Индукция магнитного поля в центре катушки составляет:

где Pm - магнитный момент, создаваемый током катушки I, R0- радиус катушки, S - площадь катушки.
За счет взаимодействия с проводящим и/или ферромагнитным объектом возникает добавочная компонента индукции. Так как механизм ее появления точно такой же, как и в рассмотренном ранее случае металлоискателя по принципу "передача - прием", можно воспользоваться результатами предыдущего раздела и записать для добавочной компоненты индукции:

где K1 - коэффициент, вычисляемый по формуле (1.8), (1.9) или (1.23).
Так как коэффициент K1 - функция комплексная, то и относительное изменение индукции можно обозначить как функцию оператора Лапласа:

Таким образом, полное сопротивление катушки датчика металлоискателя (без учета омического сопротивления провода и межвитковой емкости) можно представить как:

где L - индуктивность катушки без влияния объекта.
Под воздействием объекта меняется полное сопротивление катушки. В металлоискателях на биениях это изменение оценивается по изменению резонансной частоты колебательного LC- контура, образованного катушкой датчика и конденсатором.
Рис. 15. Взаимодействие однокатушечного датчика металлоискателя с объектом.

Ф. 1.35 Индукция магнитного поля в центре катушки

Ф. 1.36 Индукция магнитного поля в центре катушки для добавочной компоненты индукции

Ф. 1.37 Относительное изменение индукции можно обозначить как функцию оператора Лапласа
Ф. 1.38 Полное сопротивление катушки датчика металлоискателя

3.2.3. Практические соображения
3.2.3. Практические соображения
Чувствительность металлоискателя на биениях определяется выражениями (1.36)-(1.38) и зависит, кроме того от параметров преобразования изменения полного сопротивления датчика в частоту. Как уже отмечалось, обычно преобразование заключается в получении разностной частоты стабильного генератора и генератора с катушкой датчика в частотозадающей цепи. Поэтому, чем выше будут частоты этих генераторов, тем больше будет разность частот в отклик на появление металлической мишени вблизи датчика. Регистрация небольших отклонений частоты представляет определенную сложность. Так, на слух можно уверенно зарегистрировать уход частоты тонального сигнала не менее 10(Гц). Визуально, по миганию светодиода можно зарегистрировать уход частоты не менее 1(Гц). Другими способами можно добиться регистрации и меньшей разности частот, однако эта регистрация потребует значительного времени, что неприемлемо для металлоискателей, которые всегда работают в реальном масштабе времени.
Способ выделения небольшой по величине разности частот двух генераторов порождает существенную техническую проблему в виде явления захвата фазы. Оно заключается в том, что два генератора, настроенные на очень близкие частоты, имеют тенденцию к паразитной взаимной синхронизации. Эта синхронизация проявляется в том, что при попытке приблизить каким-либо путем разностную частоту двух генераторов к нулю, по достижению разностной частотой некоторого порога, происходит скачкообразный переход к состоянию генераторов, когда их частоты совпадают. Генераторы становятся синхронизированными. Физически, явление захвата фазы объясняется нелинейностями, неизбежно присутствующими в любом генераторе, и паразитньм проникновением сигнала одного генератора в другой (по цепям питания, через паразитные емкости и т.д.). Как показывает практика, если не прибегать к специальным ухищрениям типа оптоэлектронной развязки генераторов, то реально получить для разностной частоты порог наступления паразитной синхронизации порядка 10^(-4) относительно частоты генераторов. Отсюда можно получить оценку для частоты, на которой должен работать металлоискатель на биениях, для получения максимальной чувствительности - 10...100(кГц) и выше.
Селективность по металлам на таких частотах, весьма далеких от оптимальной (1.34), проявляется очень слабо. Кроме того, по сдвигу частоты генератора определить фазу отраженного сигнала практически невозможно. Поэтому селективность у металлоискателя на биениях отсутствует.
Отклик прибора на металлический объект, в соответствии с формулой (1.36), обратно пропорционален шестой степени расстояния. То есть, он практически такой же, как и у металлоискателей по принципу "передача-прием". Однако, дальность обнаружения приборов данного типа обычно намного хуже вследствие эффекта паразитной синхронизации.
Положительной для практики стороной является простота конструкции датчика и электронной части металлоискателя на биениях. Такой прибор может быть очень компактным. Им удобно пользоваться, когда что-либо уже обнаружено более чувствительным прибором. Если обнаруженный предмет небольшой и находится достаточно глубоко в земле, то он может "затеряться", переместиться в ходе раскопок. Чтобы по многу раз не "просматривать" громоздким чувствительным металлоискателем место раскопок, желательно на завершающей стадии контролировать их ход компактным прибором малого радиуса действия, которым можно более точно узнать местонахождение предмета.
3.2.4. Выводы
3.2.4. Выводы
1. Металлоискатели на биениях имеют меньшую чувствительность, чем металлоискатели по принципу "передача-прием".
2. Селективность по типам металлов отсутствует.
3.3. Однокатушечный металлоискатель индукционного типа
3.3.1. Принцип действия
3.3.1. Принцип действия
Слово "индукционный" в названии металлоискателей данного типа полностью раскрывает принцип их работы, если вспомнить смысл слова "inductio" (лат.) - наведение. Прибор данного типа имеет в составе датчика одну катушку любой удобной формы, возбуждаемую переменным сигналом. Появление вблизи датчика металлического предмета вызывает появление отраженного (переизлученного сигнала), который "наводит" в катушке дополнительный сигнал электрический. Остается этот дополнительный сигнал только выделить.
Металлоискатель индукционного типа получил право на жизнь, главным образом, из-за основного недостатка приборов по принципу "передача-прием" - сложности конструкции датчиков. Эта сложность приводит либо к высокой стоимости и трудоемкости изготовления датчика, либо к его недостаточной механической жесткости, что обуславливает появление ложных сигналов при движении и снижает чувствительность прибора. Если задаться целью устранить у приборов по принципу "передача-прием" этот недостаток, то можно придти к необычному выводу - излучающая и приемная катушки у металлоискателя должны быть объединены в одну! В самом деле, весьма нежелательные перемещения и изгибы одной катушки относительно другой в данном случае отсутствуют, так как катушка только одна и она одновременно и излучающая, и приемная. Налицо также предельная простота датчика. Платой за эти преимущества является необходимость выделения полезного отраженного сигнала на фоне значительно большего сигнала возбуждения излучающей/приемной катушки.
Принципиальная схема входной части
Выделить отраженный сигнал можно, если вычесть из электрического сигнала, присутствующего в катушке датчика, сигнал той же формы, частоты, фазы и амплитуды, что и сигнал в катушке при отсутствии металла вблизи. Как это можно реализовать одним из способов, показано в виде структурной схемы на рис. 16.
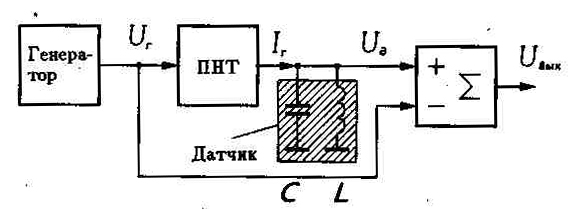
Рис.16. Структурная схема входного узла индукционного металлоискателя
Генератор вырабатывает переменное напряжение синусоидальной формы с постоянной амплитудой и частотой. Преобразователь "напряжение-ток" (ПНТ) преобразует напряжение генератора Uг в ток Iг, который задается в колебательный контур датчика. Колебательный контур состоит из конденсатора С и катушки L датчика. Его резонансная частота равна частоте генератора. Коэффициент преобразования ПНТ выбирается таким, чтобы напряжение колебательного контура Uд равнялось напряжению генератора Uг (в отсутствие металла вблизи-датчика). Таким образом, на сумматоре происходит вычитание двух сигналов одинаковой амплитуды, а выходной сигнал - результат вычитания - равен нулю. При появлении металла вблизи датчика возникает отраженный сигнал (иными словами, меняются параметры катушки датчика) и это приводит к изменению напряжения колебательного контура Uд. На выходе появляется сигнал, отличный от нуля.
На рис.16 приведен лишь простейший вариант одной из схем входной части металлоискателей рассматриваемого типа, как простейший. Вместо ПНТ в данной схеме в принципе возможно использование токозадающего резистора. Могут быть использованы различные мостовые схемы для включения катушки датчика, сумматоры с различными коэффициентами передачи по инвертирующему и неинвертирующему входам, частичное включение колебательного контура, и т.д. и т.п.
В схеме на рис. 16 в качестве датчика используется колебательный контур. Это сделано для простоты, чтобы получить нулевой сдвиг фаз между сигналами Uг и Uд (контур настроен на резонанс). Можно отказаться от колебательного контура с необходимостью точной настройки его на резонанс и использовать в качестве нагрузки ПНТ только катушку датчика. Однако, коэффициент передачи ПНТ для этого случая должен быть комплексным, чтобы скорректировать сдвиг фазы приблизительно на 90°, возникающий из- за индуктивного характера нагрузки ПНТ.
Рис.16. Структурная схема входного узла индукционного металлоискателя

3.3.2. Теоретические соображения
3.3.2. Теоретические соображения
Как уже отмечалось, металлоискатель индукционного типа можно представить как некоторый предельный случай металлоискателя по принципу "передача-прием", когда излучающая и приемная катушка совпадают. Поэтому многими результатами раздела 1.1 можно воспользоваться и для металлоискателя индукционного типа. Кроме того, от металлоискателя на биениях индукционный металлоискатель отличается только способом регистрации отраженного сигнала, поэтому и некоторые результаты раздела 1.2 также будут справедливы для прибора индукционного типа.
Взаимодействие катушки металлоискателя индукционного типа с металлическим объектом может проиллюстрировать рис.15. Отраженный сигнал можно оценить величиной индукции магнитного поля (1.36). В отличие от приборов по принципу "передача-прием", величина отраженного сигнала при допущении (1.3) зависиттолько от расстояния между объектом и датчиком, и не зависит от ориентации датчика на объект.
Дополнительное напряжение, наведенное в катушке датчика отраженным сигналом, вычисляется по формуле (1.17), где индукция отраженного сигнала равна (1.36). Без учета знака это напряжение составляет:

где p - оператор Лапласа, I - ток в катушке, r - расстояние между датчиком и объектом, S - площадь катушки, N - число ее витков, R - эквивалентный радиус объекта, KS- коэффициент, вычисляемый по формуле (1.23).
Ф. 1.39 Индукция отраженного сигнала

3.3.3. Практические соображения
3.3.3. Практические соображения
Отклик прибора по напряжению на металлический объект, в соответствии с формулой (1.39), обратно пропорционален шестой степени расстояния. То есть, он практически такой же, как и у металлоискателей по принципу "передача-прием". Аналогичен и принцип регистрации отраженного сигнала. Поэтому теоретическая чувствительность индукционного металлоискателя такая же, как и у приборов по принципу "передача-прием".
Теоретические соображения по поводу селективности, приведенные в разделе 1.1 для металлоискателя по принципу "передача-прием", справедливы и для индукционного металлоискателя. Селективность определяется коэффициентом (1.23), входящим в формулу (1.39) для напряжения полезного отраженного сигнала.
Из конструктивных особенностей следует отметить простоту конструкции датчика металлоискателя. Платой за простоту, как указывалось выше, является необходимость .выделения малого полезного сигнала на фоне большого электрического сигнала возбуждения катушки датчика металлоискателя. Если учесть, что соотношение амплитуд этих сигналов может достигать 105...106, то ясно, что для практики это не простая, хотя и вполне разрешимая задача. Сложность решения этой задачи заключается в том, что катушка датчика металлоискателя реагирует не только на полезный отраженный сигнал, но и на любое изменение ее параметров. К счастью, чувствительность к механическим деформациям у датчика индукционного металлоискателя намного ниже, чем у приборов по принципу "передачаприем". Однако, возникает специфическая для индукционного металлоискателя проблема температурной чувствительности датчика. Дело в том, что омическое сопротивление провода (обычно медного), которым намотана катушка датчика, практически линейно растет с ростом температуры. Вызванные неизбежными колебаниями температуры, эти сравнительно медленные изменения полного сопротивления и напряжения датчика очень невелики сами по себе, однако сопоставимы или даже больше, чем от воздействия полезного сигнала. Таким образом, актуальной становится задача компенсации температурного дрейфа полного сопротивления катушки датчика металлоискателя.
3.3.4. Выводы
3.3.4. Выводы
1. Индукционные металлоискатели сочетают в себе вы сокую чувствительность и селективность металлоискателей по принципу "передача-прием" и простоту конструкции датчика металлоискателей на биениях.
2. Актуальной становится задача компенсации темпера турного дрейфа параметров катушки датчика металлоискателя.
3.4 Другие типы металлоискателей
3.4. ДРУГИЕ ТИПЫ МЕТАЛЛОИСКАТЕЛЕЙ
Первый вопрос, который возникает у человека после ознакомления с недостатками и ограничениями тех или иных металлоискателей, звучит приблизительно так: "Какие существуют другие принципы и приборы на их основе для дистанционного обнаружения металлических предметов?" Вопрос закономерен, однако приводимый ниже ответ на него, вероятно, не сильно обрадует любознательного читателя.
Импульсные металлоискатели
В рассмотренных ранее трех типах электронных металлоискателей отраженный сигнал отделяется от излучаемого. либо геометрически - за счет взаимного расположения приемной и излучающей катушки, либо с помощью специальных схем компенсации. Очевидно, что может существовать и временной способ разделения излучаемого и отраженного сигналов. Такой способ широко используется, например, в импульсной эхо- и радиолокации. При локации механизм задержки отраженного сигнала обусловлен значительным временем распространения сигнала до объекта и обратно. Однако, применительно к металлоискателям, таким механизмом может быть и явление самоиндукции в проводящем объекте. После воздействия импульса магнитной индукции в проводящем объекте возникает и некоторое время поддерживается вследствие явления самоиндукции затухающий импульс тока, обуславливающий задержанный по времени отраженный сигнал. Таким образом, может быть предложена другая схема металлоискателя, принципиально отличающаяся от рассмотренных ранее по способу разделения сигналов. Такой металлоискатель получил название импульсного. Он состоит из генератора импульсов тока, приемной и излучающей катушек, устройства коммутации и блока обработки сигнала.
Генератор импульсов тока формирует короткие импульсы тока миллисекундного диапазона, поступающие в излучающую катушку, где они преобразуются в импульсы магнитной индукции. Так как излучающая катушка - нагрузка генератора импульсов имеет ярко выраженный индуктивный характер, на фронтах импульсов у генератора возникают перегрузки в виде всплесков напряжения. Такие всплески могут достигать по амплитуде сотен (!) вольт, однако использование защитных ограничителей недопустимо, так как оно привело бы к затягиванию фронта импульса тока и магнитной индукции и, в конечном счете, к усложнению отделения отраженного сигнала.
Приемная и излучающая катушки могут располагаться друг относительно друга достаточно произвольно, так как прямое проникновение излучаемого сигнала в приемную катушку и действие на нее отраженного сигнала разнесены по времени. В принципе, одна катушка может выполнять роль как приемной, так и излучающей, однако в данном случае гораздо сложнее будет развязать высоковольтные выходные цепи генератора импульсов тока и чувствительные входные цепи.
Устройство коммутации призвано произвести упомянутое выше разделение излучаемого и отраженного сигналов. Оно блокирует входные цепи прибора на определенное время, которое определяется временем действия импульса тока в излучающей катушке, временем разрядки катушки и временем, в течение которого возможно появление коротких откликов прибора от массивных слабопроводящих объектов типа грунта. По истечении же этого времени устройство коммутации должно обеспечить беспрепятственную передачу сигнала с приемной катушки на блок обработки сигнала.
Блок обработки сигнала предназначен для преобразования входного электрического сигнала в удобную для восприятия человеком форму. Он может быть сконструирован на основе решений, используемых в металлоискателях других типов.
К недостаткам импульсных металлоискателей следует отнести сложность реализации на практике дискриминации объектов по типу металла, сложность аппаратуры генерации и коммутации импульсов тока и напряжения большой амплитуды, высокий уровень радиопомех.
Магнитометры
Магнитометрами называется обширная группа приборов, предназначенных для измерения параметров магнитного поля (например, модуля или составляющих вектора магнитной индукции). Использование магнитометров в качестве металлоискателей основано на явлении локального искажения естественного магнитного поля Земли ферромагнитными материалами, например железом. Обнаружив с помощью магнитометра отклонение от обычного для данной местности модуля или направления вектора магнитной индукции поля Земли, можно с уверенностью утверждать о наличии некоторой магнитной неоднородности (аномалии), которая может быть вызвана железньм предметом.
По сравнению с рассмотренными ранее металлоискателями, магнитометры имеют гораздо большую дальность обнаружения железных предметов. Очень впечатляет информация о том, что с помощью магнитометра можно зарегистрировать мелкие обувные гвозди от ботинка на расстоянии 1(м), а легковой автомобиль - на расстоянии 10(м)! Такая большая дальность обнаружения объясняется тем, что аналогом излучаемого поля обычных металлоискателей для магнитометров является однородное магнитное поле Земли, поэтому отклик прибора на железный предмет обратно пропорционален не шестой, а третьей степени расстояния.
Принципиальным недостатком магнитометров является невозможность обнаружения с помощью них предметов из цветных металлов. Кроме того, даже если нас интересует только железо, применение магнитометров для поиска затруднительно. Во-первых, в природе существует большое разнообразие естественных магнитных аномалий самого различного масштаба (отдельные минералы, залежи минералов и т.п.) Во-вторых, магнитометры обычно громоздки и не предназначены для работы в движении.
Для иллюстрации бесполезности магнитометров при поиске кладов и реликвий можно привести такой пример. С помощью обычного компаса, который по сути является простейшим магнитометром, можно зарегистрировать обычное железное ведро на расстоянии около 0,5(м), что само по себе является неплохим результатом. Однако (!), попробуйте с помощью компаса найти то же ведро, спрятанное под землей, в реальных условиях!
Радиолокаторы
Общеизвестен факт, что с помощью современных радиолокаторов можно обнаружить такой объект, как самолет, на расстоянии нескольких сотен километров. Возникает вопрос: неужели современная электроника не позволяет создать компактное устройство, пусть намного уступающее по дальности обнаружения современным стационарным радиолокаторам, но позволяющее обнаруживать интересующие нас предметы (см. название книги)? Ответом является ряд публикаций, в которых такие устройства описаны.
Типичным для них является применение достижений современной микроэлектроники СВЧ, компьютерной обработки полученного сигнала. Использование современных высоких технологий практически делает невозможным самостоятельное изготовление этих устройств. Кроме того, большие габариты пока не позволяют их широко применять в полевых условиях.
К преимуществам радиолокаторов следует отнести принципиально более высокую дальность обнаружения отраженный сигнал в грубом приближении можно считать подчиняющимся законам геометрической оптики и его ослабление пропорционально не шестой и даже не третьей, а лишь второй степени расстояния.